Trustworthy forever
Full licensing opportunity for VirtuosoNext and GoedelWorks
In the last couple of years, Altreonic has been setting up a new business units like KURT.mobi entering the market of urban electric mobility and KURT.energy for safe batteries. The KURT vehicle concept fully exploits the advantages and features of our VirtuosoNext Designer with a fully distributed and fault tolerant, fine-grain partitioning RTOS kernel at its core. The GoedelWorks environment is also in use to support the project from early requirements to full implementation.
As these new developments have become the main business objective of Altreonic, the technology is hence only offered as an Open Technology License (see link here) and includes all available documentation, source code, test suites, etc. for all targets supported. This includes a 3 days hands-on training. Porting to new targets / BSPs is possible as an engineering service, as part of an in-depth training in team with the customer. A more in-depth training can be provided upon request. A detailed overview is given below. Note that the software is delievred "as is", essentially a check-out of the svn repository.
Academic institutions and non-profit research organisations can benefit from special conditions. Contact Altreonic.
Altreonic will continue to support existing licensees and maintain the software as needed. Internal developments and extensions will continue droven by our application needs. Altreonic will still make licenses available in the context of customer specific engineering projects.
Interested licensees should contact Altreonic directly for the licensing conditions.
Overview:
Position paper: VirtuosoNext RTOS for e-Mobility
In this short paper, we explain how e-mobility and the drive towards autonomous driving and MaaS is being disruptive for the traditional automotive vehicle makers. We show how’s KURT’s Software Driven approach meets the challenges.
Altreonic and LikeAbird join forces
Date: 9th October 2017
Press Release:
Altreonic NV, provider of the unique fault tolerant VirtuosoNext RTOS environment, and
LikeAbird S.L.U., provider of the INAV-IG, the industrial grade Autopilot/Flight Control System Ecosystem for unmanned systems and drones
join forces in combining both technologies in an integrated platform.
LikeAbird is a R&D Think Tank company providing innovative systems, products and solutions in the field of the unmanned (air/land/sea) and robotic industry.
Altreonic speaker at Smart Systems Industry Summit
Date and place: 17th October 2017, Mechelen, Belgium
Title: Autonomous systems: surviving the nanosecond blue screen
by Eric Verhulst, CEO/CTO - Altreonic
Abstract: Smart systems are a hot topic these days. Enabled by continuously shrinking electronics, we can now add software to almost anything, from thermostats to autonomously driving cars and self-regulating energy networks. But is a smart system also trustworthy? Will it ever be smart enough to be trustworthy? Self driving cars for example use artificial intelligence to mimic the behaviour of an experienced driver. Clearly, this is a hypothetical driver as human drivers make mistakes all the time. And how would you feel when your car updates its driving software while driving? How smart is a self-driving software that keeps on speeding after it detected six times in a row that the driver was not paying attention to its warnings? How smart is it to have a dishwasher talk to the internet so that it doesn't work when you have no connection? Of course, this type of smartness was introduced by smart people. The issue is complexity, made worse by legacy developed at a time when trustworthiness was a second thought. In the real world the complexity is immense and the law of Murphy is king. The question is how can we make things simultaneously smart and trustworthy? Another question is whether such a smart system should mimic a human brain? Trustworthy means predictable, safe and secure; all aspects for which humans have a very bad reputation. The road to salvation is a systematic one whereby unavoidable errors and faults are taking into account at every step of the development. Fault tolerance and resilience are key.
Full program here.
Download the presentation in attachment.
Flanders Make Seminar Day 2017
How do companies tackle technological challenges?
During this Seminar Day, engineers, researchers and R&D managers from the manufacturing industry will come together to learn more about the results of some of our recent projects.
More specifically, Altreonic will show how POF reliability prediction and analysis at system level is applied by Altreonic for developing the KURT e-mobility vehicle. The process covers from selection of components and sub-system modules as well as the software architecture.
Date: 28/09/2017 - De Montil, Moortelstraat 8, 1790 Affligem
Fault tolerant VirtuosoNext RTOS for ARM Cortex-M microcontrollers
Altreonic has now ported the latest VirtuosoNext Designer to ARM Cortex M-series microcontrollers. The latest version fully exploits the Memory Protection support to provide fine-grain partitioning and allows fine-grain recovery from processor exceptions in a few microseconds at the Task level. This effectively provides fault tolerance for the applications without the system experiencing any significant delay and without having to apply costly hardware redundancy schemes. At the system level, the resilience level is greatly increased at virtually no cost. The economic advantages are significant.
System level failure statistics needed
Now that we have support for fault recovery in VirtuosoNext, we have been wondering how extensive the coverage could be in real-life systems. The issue is that data on failure root causes is either considered as confidential, either narrowly focusing on specific elements (e.g. hardware reliability). We cannot really find statistical data for these system level failures. Do you know of any such data?
Altreonic successfully delivers on the EuroCPS NoFist project
PRESS RELEASE
Pressemitteilung • Communiqué de Presse • Comunicato Stampa
Altreonic successfully delivers on the EuroCPS NoFist project
(Novel Fine Grain Space and Time Partitioning for a Mixed Criticality Platform)
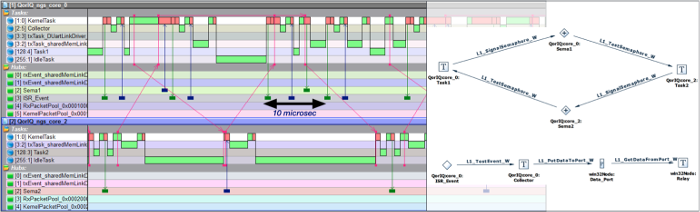
In the project, supervised by Thales TRT, Altreonic ported and further developed VirtuosoNext Designer, providing as an industry’s first fine-grain space and time portioning. The latter enables non-stop hard real-time processing by recovering from runtime faults in microseconds on the selected Freescale T2080 platform.
Non-stop hard real-time processing with VirtuosoNext for safety

A fault-tolerant, fully distributed RTOS
Just when you thought there was nothing new anymore in the world of RTOS, the VirtuosoNext RTOS announces seamless fault-tolerance, a milestone for embedded safety and security.
Synopsis: As the world is moving towards "smarter" systems, often embedded, and our life and society is becoming dependent on their uninterrupted operation, fault-tolerance is becoming a prime requirement. Just think about autonomous driving. Will it safely bring you home all the time? In case of a system fault, the reaction time is less than 100 milliseconds. No time for a reboot.
A consequence of the fine-grain space partitioning support in VirtuosoNext is the capability to recover from runtime faults within a few microseconds. The combination of fine-grain concurrency and this fast recovery effectively provides support for non-stop hard real-time processing even when faults occur without a complex and costly system design. VirtuosoNext non-stop capability means that fault-tolerance comes in reach in a cost-efficient manner, as well as in terms of development effort as in terms of compute resources.
New booklet on real-time programming of multicore processors
 Altreonic has released an updated version of its "QoS and real-time requirements for embedded many- and multicore systems" booklet. A major chapter was added covering the fine-grain partitioning support of VirtuosoNext on several target processors (Texas Instruments M3, A9, C6678 and Freescale 2080). The paper clearly shows that partitioning support for safety and security can be implemented with almost no penalties for the real-time behaviour. In addition, the code size remains very modest (ranging from less than 10 kbytes to 38 kbytes depending on the target). Download the attached publication for more details.
Altreonic has released an updated version of its "QoS and real-time requirements for embedded many- and multicore systems" booklet. A major chapter was added covering the fine-grain partitioning support of VirtuosoNext on several target processors (Texas Instruments M3, A9, C6678 and Freescale 2080). The paper clearly shows that partitioning support for safety and security can be implemented with almost no penalties for the real-time behaviour. In addition, the code size remains very modest (ranging from less than 10 kbytes to 38 kbytes depending on the target). Download the attached publication for more details.