Trustworthy forever
The year of the KURT
Many of you expect to receive my annual poem at the year's transition. I must admit, becoming a poet once per year is getting harder. I guess our brain evolves eliminating gradually the free-form associations, our life experience patterns taking over. Nevertheless, for those who prefer to skip the next philosophical ramblings, I still managed to write a short one.
This being said, best wishes for an inspiring new year!
(The sun's energy and carbon, source of all life).
Altreonic is revamping electric vehicle on beautomotive.be
Now that we are using electricity for transport, it is high time that we rethink the vehicles themselves.” That is exactly what Eric Verhulst and his team of engineers at Altreonic in Lubbeek have done. The result? The remarkable KURT e-vehicle, the lab prototype of which has elicited very positive reactions from the market. Read further on the beautomotive.be website
Remote monitoring and fleet management of the KURT vehicle.
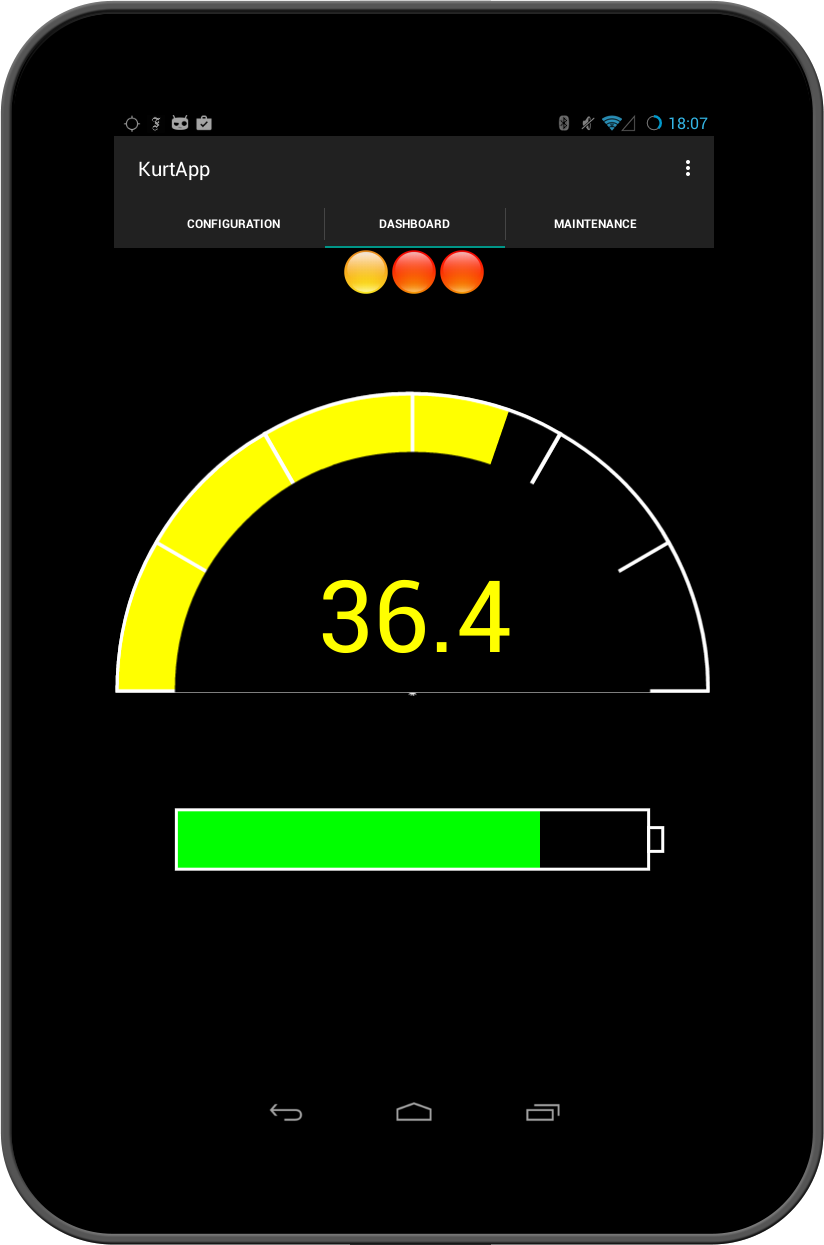 Developing the KURT vehicle has resulted also into a number of significant enhancements to Altreonic's supporting tools. The KURT controller software runs on the VirtuosoNext RTOS. To enhance safety and security, all Tasks and memory regions are protected from each other, yet it runs on a modest ARM M-series controller with little memory. As VirtuosoNext is a distributed operating system, the application runs replicated on the four controlling nodes of the KURT self-propelled platform. The GoedelWorks platform is used to keep track of all engineering data in a traceable way. In line with the methodology, the KURT vehicle can also be remotely monitored through a smartphone or mini-tablet (that functions as driver's vehicle dashboard).
Developing the KURT vehicle has resulted also into a number of significant enhancements to Altreonic's supporting tools. The KURT controller software runs on the VirtuosoNext RTOS. To enhance safety and security, all Tasks and memory regions are protected from each other, yet it runs on a modest ARM M-series controller with little memory. As VirtuosoNext is a distributed operating system, the application runs replicated on the four controlling nodes of the KURT self-propelled platform. The GoedelWorks platform is used to keep track of all engineering data in a traceable way. In line with the methodology, the KURT vehicle can also be remotely monitored through a smartphone or mini-tablet (that functions as driver's vehicle dashboard).
Mobility as a Service: On the road to packet switching
Altreonic has published a new article on the Move Forward website. Below the abstract:
 A few decades ago, telecom and internet spawned a new and disruptive socio-economic wave by bringing the marginal cost of communication and information sharing close to zero. This was largely made possible by a switch from circuit-switching to packet-switching networks. Information as well as voice and video is chopped up in small packets and flows over dynamically changing virtual highways and no longer over fixed wires. How can the key learnings from this revolution be applied to Mobility as a Service?
A few decades ago, telecom and internet spawned a new and disruptive socio-economic wave by bringing the marginal cost of communication and information sharing close to zero. This was largely made possible by a switch from circuit-switching to packet-switching networks. Information as well as voice and video is chopped up in small packets and flows over dynamically changing virtual highways and no longer over fixed wires. How can the key learnings from this revolution be applied to Mobility as a Service?
ARRL and antifragility in special Springer magazine
 Altreonic was invited to submit an article in a special issue of the Springer Journal of Reliable Intelligent Environments. In the article with as title "Antifragility: systems engineering at its best", we discuss the ARRL (Assured Reliability and resileience Level" criterion at length. From the magazine editorial by Vincenzo de Florio: "In “Antifragility: systems engineering at its best”, Eric Verhulst, Bernhard Sputh, and Pieter Van Schaik discuss the Assured Reliability and Resilience Level (ARRL), a novel criterion that allows system components to be reused in a normative way while preserving the safety integrity level at the system level. ARRL complements the Safety Integrity Level and defines seven levels of which the highest one can be described as the level where the system becomes antifragile. Each level is illustrated and exemplified. It is shown how the features and the general character of ARRL translate into a promising approach for achieving safety across different domains and systems".
Altreonic was invited to submit an article in a special issue of the Springer Journal of Reliable Intelligent Environments. In the article with as title "Antifragility: systems engineering at its best", we discuss the ARRL (Assured Reliability and resileience Level" criterion at length. From the magazine editorial by Vincenzo de Florio: "In “Antifragility: systems engineering at its best”, Eric Verhulst, Bernhard Sputh, and Pieter Van Schaik discuss the Assured Reliability and Resilience Level (ARRL), a novel criterion that allows system components to be reused in a normative way while preserving the safety integrity level at the system level. ARRL complements the Safety Integrity Level and defines seven levels of which the highest one can be described as the level where the system becomes antifragile. Each level is illustrated and exemplified. It is shown how the features and the general character of ARRL translate into a promising approach for achieving safety across different domains and systems".
Access the article here
Further information can be found in the Gödel Series booklet.
Altreonic releases VirtuosoNext v.1.1
Altreonic is proud to announce the release of the version 1.1 of VirtuosoNext™, its high level yet very performant design and programming solution for trustworthy systems development. VirtuosoNext is derived from the formally developed network-centric and distributed OpenComRTOS who’s functionality is inherited.
VirtuosoNext adds the capability to apply fine-grain time and space partitioning when the hardware supports it. VirtuosoNext provides safety measures to trap runtime errors without the system coming to a halt. The approach separates the code in a trusted zone (managed by the VirtuosoNext kernel) and an untrusted zone (executing application tasks). Contrary to traditional hypervisor approaches, the code size and performance penalty is minimal safeguarding the real-time response of a traditionally unprotected RTOS as standard priority based preemptive scheduling is maintained.
VirtuosoNext (protected mode) was initially disclosed in April 2015 This new release has also restructured the code resulting in even lower code sizes. On the ARM-M3, the VirtuosoNext kernel measures between 8 to 11.5 Kbytes. On the ARM A9, the kernel measures between 15 to 22 Kbytes.
Supported processors are ARM M3/M4/R4/R5 and the A7/A9/A15 processor family. The user has the option to enable the protection on specified processing nodes in his distributed or manycore target system. VirtuosoNext 1.1 will hence on make the previous and stable OpenComRTOS v.1.6 superseded as its functionality is integrated. The new services and improvements added with VirtuosoNext v.1.1 can be consulted in the attached files.
Share |
Release of GoedelWorks 3.0
Altreonic is proud to announce the release of the version 3.0 of GoedelWorks™, its unique end-to-end portal solution for trustworthy systems development. This new version improves the performance and stability of the whole platform and it introduces many new features that ease repetitive tasks. It also improves existing functionalities. Some of the new features are the outcome of an RTOS Qualification Package project. GoedelWorks is now even more intuitive and productive in use than before.
The GoedelWorks platform running on the central server has also been updated to make use of the latest stable, production-ready technologies. Revising the entire platform has resulted in a cleaner and easier to maintain environment.
Starting 1st September, GoedelWorks is not only available under an Open Technology Licensing scheme but users can also access their portal under a SaaS model. Contact Altreonic for details.
The technical details about the novelties offered with this latest GoedelWorks are available in the attached public announcement. A full description of the latest GoedelWorks environment is available in Altreonic’s updated booklet “Trustworthy Systems Engineering with GoedelWorks 3”. It can be freely downloaded from the download section.
Share |
New booklet on ARRL
A new booklet was published in the Gödel Series on the topic of the ARRL (Assured reliability and Resilience Level) criterion. Developed by Altreonic, ARRL is complementary to the traditional Safety Integrity Levels but is domain independent. It aims at a criterion that acts as a contract for the reuse of components and (sub)-systems in the context of trustworthy systems engineering, in particular for safety critical systems. It achieves this by taking faults and how the component or system deals with it, into account. The booklet is available from the download section.
Share |
The disruptive nature of automated Mobility as a Service
Altreonic has published a new article on the Move Forward website. Below the abstract:
Autonomous vehicles will change the way people lead their lives and move around in cities. There is a likely possibility that self-driving technology will cause a shift from a private to a shared mobility service. The disruptive nature of automated Mobility as a Service (MaaS) is comparable to what internet did for information and communication (bringing it down to a low marginal cost). This time however, the impact will be deeper as it impacts us much more physically. At the same time, it solves a real problem as people are increasingly gridlocked in traffic. But, how will this likely disruptive transition impact other modes of transport, our society and the economy?
Altreonic moves to larger offices
Since 10th August 2015, Altreonic's operational offices are located at: Staatsbaan 4A/1, 3210 Lubbeek, Belgium (close to Leuven, 30 minutes from Brussels. See the contact page for details and an access map. The new offices are an important step towards further development of the e-mobility KURT product group.